Á³áë³îòåêà åëåìåíò³â ðåãóëþâàííÿ
| ²ì'ÿ: | regEl |
| Çàñíîâàíî: | ñ³÷åíü 2010ã |
| Âåðñèÿ: | 0.5.0 |
| Ñòàòóñ: | ³äêðèòèé (GPL) |
| Àâòîð: | Ðîìàí Ñàâî÷åíêî |
| Îïèñ: | Á³áë³îòåêà ôóíêö³é ðåãóëþâàííÿ. |
| Àäðåñà: | ÁÄ ó ôàéë³: SQLite.LibDB.regEl ( |
Ïðî á³áë³îòåêó
Á³áë³îòåêà ñòâîðþºòüñÿ äëÿ íàäàííÿ ôóíêö³é ð³çíèõ àëãîðèòì³â ðåãóëþâàííÿ òà ìîæå áóòè âèêîðèñòàíà ó ïðîãðàìîâàíèõ ëîã³÷íèõ êîíòðîëåðàõ (ÏËÊ) íà îñíîâ³ OpenSCADA äëÿ ïîáóäîâè ñõåì êåðóâàííÿ. Á³áë³îòåêà íå º ñòàòè÷íîþ, òà áóäóºòüñÿ íà îñíîâ³ ìîäóëÿ JavaLikeCalc, ÿêèé äîçâîëÿº ñòâîðþâàòè îá÷èñëåííÿ íà ìîâ³ ïîä³áí³é äî Java.
Äëÿ àäðåñàö³¿ äî ö³º¿ á³áë³îòåêè ìîæíà âèêîðèñòàòè ñòàòè÷íó àäðåñó âèêëèêó "DAQ.JavaLikeCalc.lib_regEl.{Func}" àáî äèíàì³÷íó "SYS.DAQ.JavaLikeCalc["lib_regEl"]["{Func}"].call()". Äå {Func} ³äåíòèô³êàòîð ôóíêö³¿ ó á³áë³îòåö³.
ϳäêëþ÷èòè á³áë³îòåêó äî ïðîåêòó ñòàíö³¿ OpenSCADA ìîæíà øëÿõîì çàâàíòàæåííÿ âêëàäåíîãî ôàéëó ÁÄ, ðîçòàøóâàííÿ éîãî ó äèðåêòî𳿠ÁÄ ïðîåêòó ñòàíö³¿ òà ñòâîðåííÿ îá'ºêòó ÁÄ äëÿ ìîäóëÿ ÁÄ "SQLite", âêàçàâøè ôàéë ÁÄ ó êîíô³ãóðàö³¿.
1 Ñêëàä á³áë³îòåêè
Ó ñâîºìó ñêëàä³ á³áë³îòåêà ì³ñòèòü äåê³ëüêà ôóíêö³é ÷àñòî ïîòð³áíèõ ïðè ñòâîðåí³ ñõåì ðåãóëþâàííÿ. Íàçâè ôóíêö³é òà ¿õ ïàðàìåòð³â äîñòóïí³ íà òðüîõ ìîâ: Àíãë³éñüêà, Ðîñ³éñüêà òà Óêðà¿íñüêà.
Ï²Ä (óí³ô³êîâàíèé) (pidUnif)
Îïèñ: Ñóì³ùåíèé-óí³ô³êîâàíèé àíàëîãîâèé òà ³ìïóëüñíèé ϲÄ-ðåãóëÿòîð. Ó îñíîâ³ ðåãóëÿòîðà ëåæèòü ìîâà ñòàíäàðòíîãî àíàëîãîâîãî ϲÄ-ðåãóëÿòîðà ç á³áë³îòåêè "FLibComplex1" òà ðåàë³çàö³ÿ Ø²Ì äëÿ ³ìïóëüñíî¿ ÷àñòèíè.
Ïàðàìåòðè:
| ID | Ïàðàìåòð | Òèï | Ðåæèì | Ïðèõîâàíèé | Ïî çàìîâ÷åííþ |
| var | Çì³ííà | Ðåàëüíèé | Âõ³ä | false | 0 |
| sp | Çàâäàííÿ | Ðåàëüíèé | Âõ³ä | false | 0 |
| max | Ìàêñ. øêàëè | Ðåàëüíèé | Âõ³ä | false | 100 |
| min | ̳í. øêàëè | Ðåàëüíèé | Âõ³ä | false | 0 |
| manIn | Ââ³ä ðó÷íîãî | Ðåàëüíèé | Âõ³ä | false | 0 |
| out | Âèõ³ä (%) | Ðåàëüíèé | Ïîâåðíåííÿ | false | 0 |
| impQup | ²ìï. âèõ³ä ó ãîðó | Ëîã³÷íèé | Âèõ³ä | false | 0 |
| impQdwn | ²ìï. âèõ³ä äî íèçó | Ëîã³÷íèé | Âèõ³ä | false | 0 |
| analog | Àíàëîãîâèé | Ëîã³÷íèé | Âõ³ä | false | 1 |
| auto | Àâòîìàò | Ëîã³÷íèé | Âõ³ä | false | 0 |
| casc | Êàñêàä | Ëîã³÷íèé | Âõ³ä | false | 0 |
| Kp | Kï | Ðåàëüíèé | Âõ³ä | false | 1 |
| Ti | T³ (ìñ) | Ö³ëèé | Âõ³ä | false | 1000 |
| Kd | Êï äèôåðåíö³àëó | Ðåàëüíèé | Âõ³ä | false | 1 |
| Td | Tä (ìñ) | Ö³ëèé | Âõ³ä | false | 0 |
| Tzd | T ô³ëüòðà äèôåðåíö³àëó (ìñ) | Ö³ëèé | Âõ³ä | false | 0 |
| TImpPer | T ïåð³îäè÷í³ñòü ³ìïóëüñ³â (ìñ) | Ö³ëèé | Âõ³ä | false | 5000 |
| TImpMin | ̳í³ìàëüíà äîâæèíà ³ìïóëüñó (ìñ) | Ö³ëèé | Âõ³ä | false | 500 |
| KImpRfact | Ðåéòèíã ôàêòîð ³ìïóëüñ³â | Ðåàëüíèé | Âõ³ä | false | 1 |
| Hup | Âåðõíÿ ãðàíèöÿ âèõîäó (%) | Ðåàëüíèé | Âõ³ä | false | 100 |
| Hdwn | Íèæíÿ ãðàíèöÿ âèõîäó (%) | Ðåàëüíèé | Âõ³ä | false | 0 |
| Zi | Íå÷óòëèâ³ñòü (%) | Ðåàëüíèé | Âõ³ä | false | 0 |
| followSp | ³äñë³äêîâóâàòè çàâäàííÿ çà çì³ííîþ ó ðó÷íîìó | Ëîã³÷íèé | Âõ³ä | false | 1 |
| K1 | Êîåô. âõîäó 1 | Ðåàëüíèé | Âõ³ä | false | 0 |
| in1 | Âõ³ä 1 | Ðåàëüíèé | Âõ³ä | false | 0 |
| K2 | Êîåô. âõîäó 2 | Ðåàëüíèé | Âõ³ä | false | 0 |
| in2 | Âõ³ä 2 | Ðåàëüíèé | Âõ³ä | false | 0 |
| K3 | Êîåô. âõîäó 3 | Ðåàëüíèé | Âõ³ä | false | 0 |
| in3 | Âõ³ä 3 | Ðåàëüíèé | Âõ³ä | false | 0 |
| K4 | Êîåô. âõîäó 4 | Ðåàëüíèé | Âõ³ä | false | 0 |
| in4 | Âõ³ä 4 | Ðåàëüíèé | Âõ³ä | false | 0 |
| impAnOut | Àíàëîãîâå ïîëîæåííÿ ³ìïóëüñíîãî ðåãóëÿòîðà àáî øâèäê³ñòü õîäó êðàíà (%/ñ) ï³ä ÷àñ ³ì³òàö³¿. | Ðåàëüíèé | Âõ³ä | false | 0 |
| impAnImit | ²ì³òàö³ÿ àíàëîãîâîãî ïîëîæåííÿ | Ëîã³÷íèé | Âõ³ä | false | 0 |
| impQupTm | ²ìï. âèõ³ä âãîðó óòðèìàíî äëÿ GUI | Ö³ëèé | Âèõ³ä | false | 0 |
| impQdwnTm | ²ìï. âèõ³ä äîäîëó óòðèìàíî äëÿ GUI | Ö³ëèé | Âèõ³ä | false | 0 |
| f_frq | ×àñòîòà îá÷èñëåííÿ (Ãö) | Ö³ëèé | Âõ³ä | true | 1 |
| f_start | Ïåðøèé çàïóñê | Ëîã³÷íèé | Âõ³ä | true | 0 |
| f_stop | Îñòàíí³é çàïóñê | Ëîã³÷íèé | Âõ³ä | true | 0 |
| int | Çíà÷. ³íòåãðàëó | Ðåàëüíèé | Âèõ³ä | true | 0 |
| dif | Çíà÷. äèôåðåíö³àëó | Ðåàëüíèé | Âèõ³ä | true | 0 |
| lag | Çíà÷åííÿ çàòðèìêè | Ðåàëüíèé | Âèõ³ä | true | 0 |
| impLag | ×àñ óòðèìàííÿ ³ìïóëüñó | Ðåàëüíèé | Âèõ³ä | true | 0 |
| perLag | ×àñ î÷³êóâàííÿ ãåíåðàö³¿ íîâîãî ³ìïóëüñó | Ðåàëüíèé | Âèõ³ä | true | 0 |
Ñòðóêòóðà:
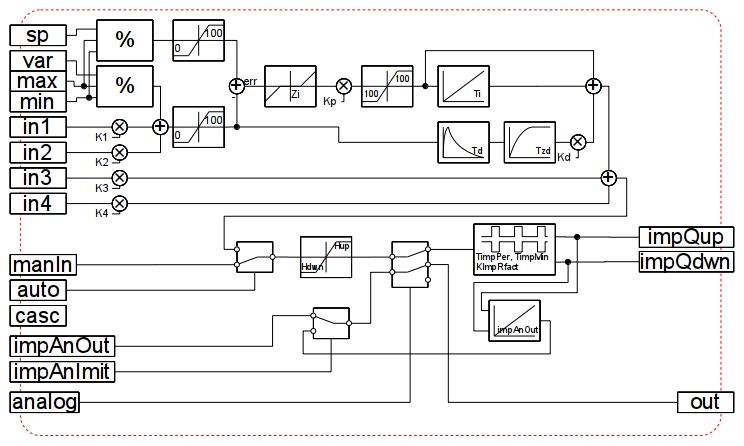
PID äèíàìè÷åñêèé (pidUnifD)
Îïèñ: Ïîëíîñòüþ èäåíòè÷íûé óíèôèöèðîâàííîìó ÏÈÄ ðåãóëÿòîð, ðåàëèçîâàííûé äèíàìè÷åñêè íà JavaLikeCalc. Äèíàìè÷åñêàÿ ðåàëèçàöèÿ ïîçâîëÿåò ëåãêî àäàïòèðîâàòü ðåãóëÿòîð ïîä íóæíûå òðåáîâàíèÿ, ïðîñòî îòðåäàêòèðîâàâ åãî.
Ïàðàìåòðè:
| ID | Ïàðàìåòð | Òèï | Ðåæèì | Ïðèõîâàíèé | Ïî çàìîâ÷åííþ |
| var | Ïåðåìåííàÿ | Âåùåñòâ. | Âõîä | false | 0 |
| sp | Çàäàíèå | Âåùåñòâ. | Âõîä | false | 0 |
| max | Ìàêñèìóì øêàëû | Âåùåñòâ. | Âõîä | false | 100 |
| min | Ìèíèìóì øêàëû | Âåùåñòâ. | Âõîä | false | 0 |
| manIn | Ðó÷íîé ââîä | Âåùåñòâ. | Âõîä | false | 0 |
| out | Âûõîä (%) | Âåùåñòâ. | Âîçâðàò | false | 0 |
| impQup | Èìï. âûõîä ââåðõ | Ëîãè÷. | Âûõîä | false | 0 |
| impQdwn | Èìï. âûõîä âíèç | Ëîãè÷. | Âûõîä | false | 0 |
| analog | Àíàëîãîâûé | Ëîãè÷. | Âõîä | false | 1 |
| auto | Àâòîìàò | Ëîãè÷. | Âõîä | false | 0 |
| casc | Êàñêàä | Ëîãè÷. | Âõîä | false | 0 |
| Kp | Kï | Âåùåñòâ. | Âõîä | false | 1 |
| Ti | Tè (ìñ) | Öåëûé | Âõîä | false | 1000 |
| Kd | Êï ïðîèçâîäíîé | Âåùåñòâ. | Âõîä | false | 1 |
| Td | Tä (ìñ) | Öåëûé | Âõîä | false | 0 |
| Tzd | T çàäåðæêè äèôåðåíöèðîâ. (ìñ) | Öåëûé | Âõîä | false | 0 |
| TImpPer | T ïåðèîä èìïóëüñà (ìñ) | Öåëûé | Âõîä | false | 5000 |
| TImpMin | T ìèíèìàëüíàÿ äëèíà èìïóëüñà (ìñ) | Öåëûé | Âõîä | false | 500 |
| KImpRfact | Ðåéòèíã ôàêòîð èìïóëüñà | Âåùåñòâ. | Âõîä | false | 1 |
| Hup | Âåðõíÿÿ ãðàíèöà âûõîäà (%) | Âåùåñòâ. | Âõîä | false | 100 |
| Hdwn | Íèæíÿÿ ãðàíèöà âûõîäà (%) | Âåùåñòâ. | Âõîä | false | 0 |
| Zi | Íå÷óâñòâèòåëüíîñòü (%) | Âåùåñòâ. | Âõîä | false | 0 |
| followSp | Ñëåäèòü çàäàíèåì çà ïåðåìåííîé â ðó÷íîì | Ëîãè÷. | Âõîä | false | 1 |
| K1 | Êîåô. âõîäà 1 | Âåùåñòâ. | Âõîä | false | 0 |
| in1 | Âõîä 1 | Âåùåñòâ. | Âõîä | false | 0 |
| K2 | Êîåô. âõîäà 2 | Âåùåñòâ. | Âõîä | false | 0 |
| in2 | Âõîä 2 | Âåùåñòâ. | Âõîä | false | 0 |
| K3 | Êîåô. âõîäà 3 | Âåùåñòâ. | Âõîä | false | 0 |
| in3 | Âõîä 3 | Âåùåñòâ. | Âõîä | false | 0 |
| K4 | Êîåô. âõîäà 4 | Âåùåñòâ. | Âõîä | false | 0 |
| in4 | Âõîä 4 | Âåùåñòâ. | Âõîä | false | 0 |
| impAnOut | Àíàëîãîâîå ïîëîæåíèå èìïóëüñíîãî ðåãóëÿòîðà èëè ñêîðîñòü õîäà êðàíà (%/ñ) ïðè èìèòàöèè. | Âåùåñòâ. | Âõîä | false | 0 |
| impAnImit | Èìèòàöèÿ àíàëîãîâîãî ïîëîæåíèÿ | Ëîãè÷. | Âõîä | false | 0 |
| impQupTm | Èìï. âûõîä ââåðõ óäåðæ. äëÿ GUI | Öåëûé | Âûõîä | false | 0 |
| impQdwnTm | Èìï. âûõîä âíèç óäåðæ. äëÿ GUI | Öåëûé | Âûõîä | false | 0 |
| f_frq | ×àñòîòà âû÷èñëåíèÿ (Ãö) | Öåëûé | Âõîä | true | 1 |
| f_start | Ïåðâûé çàïóñê | Ëîãè÷. | Âõîä | true | 0 |
| f_stop | Ïîñëåäíèé çàïóñê | Ëîãè÷. | Âõîä | true | 0 |
| impLag | Âðåìÿ óäåðæàíèÿ èìïóëüñà | Âåùåñòâ. | Âûõîä | true | 0 |
| perLag | Âðåìÿ ãåíåðàöèè íîâîãî èìïóëüñà | Âåùåñòâ. | Âûõîä | true | 0 |
| integ | Íàêîïëåíèå èíòåãðàëà | Âåùåñòâ. | Âûõîä | true | 0 |
| difer | Íàêîïëåíèå ïðîèçâîäíîé | Âåùåñòâ. | Âûõîä | true | 0 |
| dlag | Íàêîïëåíèå çàäåðæêè ïðîèçâîäíîé | Âåùåñòâ. | Âûõîä | true | 0 |
Ñòðóêòóðà:
file:pid_unif.png
PID èìïóëüñíûé (pidImp)
Îïèñ: Ñïåöèàëèçèðîâàííûé èìïóëüñíûé ÏÈÄ ðåãóëÿòîð ðåàëèçîâàííûé ïî îñîáîìó àëãîðèòìó ñ êîìïåíñàöèåé äâîéíîãî èíòåãðèðîâàíèÿ.
Ïàðàìåòðè:
| ID | Ïàðàìåòð | Òèï | Ðåæèì | Ïðèõîâàíèé | Ïî çàìîâ÷åííþ |
| var | Ïåðåìåííàÿ | Âåùåñòâ. | Âõîä | false | 0 |
| sp | Çàäàíèå | Âåùåñòâ. | Âõîä | false | 0 |
| max | Ìàêñèìóì øêàëû | Âåùåñòâ. | Âõîä | false | 100 |
| min | Ìèíèìóì øêàëû | Âåùåñòâ. | Âõîä | false | 0 |
| manIn | Ðó÷íîé ââîä | Âåùåñòâ. | Âõîä | false | 0 |
| out | Âûõîä (%) | Âåùåñòâ. | Âîçâðàò | false | 0 |
| outPID | Âûõîä PID | Âåùåñòâ. | Âûõîä | false | 0 |
| impQup | Èìï. âûõîä ââåðõ | Ëîãè÷. | Âûõîä | false | 0 |
| impQdwn | Èìï. âûõîä âíèç | Ëîãè÷. | Âûõîä | false | 0 |
| auto | Àâòîìàò | Ëîãè÷. | Âõîä | false | 0 |
| casc | Êàñêàä | Ëîãè÷. | Âõîä | false | 0 |
| Kp | Kï | Âåùåñòâ. | Âõîä | false | 1 |
| Ki | Êï èíòåãðàëà | Âåùåñòâ. | Âõîä | false | 1 |
| Ti | Tè (ìñ) | Öåëûé | Âõîä | false | 1000 |
| Kd | Êï ïðîèçâîäíîé | Âåùåñòâ. | Âõîä | false | 1 |
| Td | Tä (ìñ) | Öåëûé | Âõîä | false | 0 |
| Tzd | T çàäåðæêè äèôåðåíöèðîâ. (ìñ) | Öåëûé | Âõîä | false | 0 |
| TImpPer | T ïåðèîä èìïóëüñà (ìñ) | Öåëûé | Âõîä | false | 5000 |
| TImpMin | T ìèíèìàëüíàÿ äëèíà èìïóëüñà (ìñ) | Öåëûé | Âõîä | false | 500 |
| KImpRfact | Ðåéòèíã ôàêòîð èìïóëüñà | Âåùåñòâ. | Âõîä | false | 1 |
| Hup | Âåðõíÿÿ ãðàíèöà âûõîäà (%) | Âåùåñòâ. | Âõîä | false | 100 |
| Hdwn | Íèæíÿÿ ãðàíèöà âûõîäà (%) | Âåùåñòâ. | Âõîä | false | 0 |
| Zi | Íå÷óâñòâèòåëüíîñòü (%) | Âåùåñòâ. | Âõîä | false | 0 |
| followSp | Ñëåäèòü çàäàíèåì çà ïåðåìåííîé â ðó÷íîì | Ëîãè÷. | Âõîä | false | 1 |
| K1 | Êîåô. âõîäà 1 | Âåùåñòâ. | Âõîä | false | 0 |
| in1 | Âõîä 1 | Âåùåñòâ. | Âõîä | false | 0 |
| K2 | Êîåô. âõîäà 2 | Âåùåñòâ. | Âõîä | false | 0 |
| in2 | Âõîä 2 | Âåùåñòâ. | Âõîä | false | 0 |
| K3 | Êîåô. âõîäà 3 | Âåùåñòâ. | Âõîä | false | 0 |
| in3 | Âõîä 3 | Âåùåñòâ. | Âõîä | false | 0 |
| K4 | Êîåô. âõîäà 4 | Âåùåñòâ. | Âõîä | false | 0 |
| in4 | Âõîä 4 | Âåùåñòâ. | Âõîä | false | 0 |
| impAnOut | Àíàëîãîâîå ïîëîæåíèå èìïóëüñíîãî ðåãóëÿòîðà èëè ñêîðîñòü õîäà êðàíà (%/ñ) ïðè èìèòàöèè. | Âåùåñòâ. | Âõîä | false | 0 |
| impAnImit | Èìèòàöèÿ àíàëîãîâîãî ïîëîæåíèÿ | Ëîãè÷. | Âõîä | false | 0 |
| impQupTm | Èìï. âûõîä ââåðõ óäåðæ. äëÿ GUI | Öåëûé | Âûõîä | false | 0 |
| impQdwnTm | Èìï. âûõîä âíèç óäåðæ. äëÿ GUI | Öåëûé | Âûõîä | false | 0 |
| f_frq | ×àñòîòà âû÷èñëåíèÿ (Ãö) | Öåëûé | Âõîä | true | 1 |
| f_start | Ïåðâûé çàïóñê | Ëîãè÷. | Âõîä | true | 0 |
| f_stop | Ïîñëåäíèé çàïóñê | Ëîãè÷. | Âõîä | true | 0 |
| impLag | Âðåìÿ óäåðæàíèÿ èìïóëüñà | Âåùåñòâ. | Âûõîä | true | 0 |
| perLag | Âðåìÿ ãåíåðàöèè íîâîãî èìïóëüñà | Âåùåñòâ. | Âûõîä | true | 0 |
| integ | Íàêîïëåíèå èíòåãðàëà | Âåùåñòâ. | Âûõîä | true | 0 |
| difer | Íàêîïëåíèå ïðîèçâîäíîé | Âåùåñòâ. | Âûõîä | true | 0 |
| dlag | Íàêîïëåíèå çàäåðæêè ïðîèçâîäíîé | Âåùåñòâ. | Âûõîä | true | 0 |
| err1 | Îøèáêà øàã íàçàä | Âåùåñòâ. | Âûõîä | true | 0 |
| err2 | Îøèáêà äâà øàãà íàçàä | Âåùåñòâ. | Âûõîä | true | 0 |
Ñòðóêòóðà:
file:pid_imp.png