Regulation elements library
| Name: | regEl |
| Founded: | January 2010 |
| Version: | 0.5.0 |
| State: | Free (GPL) |
| Author: | Roman Savochenko |
| Description: | Regulation elements library. |
| Address: | DB in file: SQLite.LibDB.regEl ( |
About the library
Library is created to provide the functions of different control algorithms and can be used in programmable logic controllers (PLCs) based on OpenSCADA for construction control schemes. The library is not static, but based on the module JavaLikeCalc, allowing to create calculations on the Java-like language.
To address the functions of the library you can use static call address "DAQ.JavaLikeCalc.lib_regEl.{Func}" or dynamic "SYS.DAQ.JavaLikeCalc["lib_regEl"]["{Func}"].call()". Where {Func} function identifier in the library.
To connect the library to the project of the OpenSCADA station it is possible by downloading the attached file of the database, placing it in in the database directory of the station's project and creating the database object for the DB module "SQLite", indicating the database file in the configuration.
1 The library structure
In his part the library contains several functions often demanded by creating regulatory schemes. The functions' names and its parameters are available in three languages: English, Russian and Ukrainian.
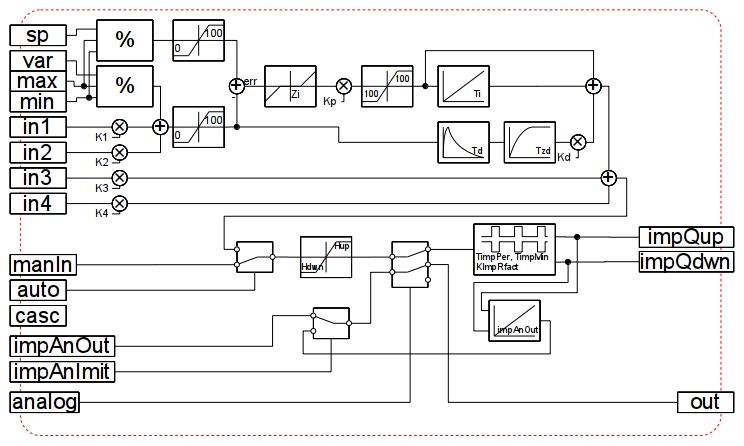
PID (unified) (pidUnif)
Description: Composite-unified analog and pulse PID. At the heart of the regulator is core a standard analog PID controller from the library "FLibComplex1" and the implementation of the PWM for the pulse part.
Parameters:
| ID | Parameter | Type | Mode | Hide | Default |
| var | Variable | Real | Input | false | 0 |
| sp | Setpoint | Real | Input | false | 0 |
| max | Scale: maximum | Real | Input | false | 100 |
| min | Scale: minimum | Real | Input | false | 0 |
| manIn | Manual input | Real | Input | false | 0 |
| out | Output (%) | Real | Return | false | 0 |
| impQup | Impulse output up | Boolean | Output | false | 0 |
| impQdwn | Impulse output down | Boolean | Output | false | 0 |
| analog | Analog | Boolean | Input | false | 1 |
| auto | Automate | Boolean | Input | false | 0 |
| casc | Cascade | Boolean | Input | false | 0 |
| Kp | Gain | Real | Input | false | 1 |
| Ti | Ti (ms) | Integer | Input | false | 1000 |
| Kd | Gain differential Real | Input | false | 1 | |
| Td | Td (ms) | Integer | Input | false | 0 |
| Tzd | T differential lag (ms) | Integer | Input | false | 0 |
| TImpPer | T impulses period (ms) | Integer | Input | false | 5000 |
| TImpMin | T minimal impulse (ms) | Integer | Input | false | 500 |
| KImpRfact | Impulse rate factor | Real | Input | false | 1 |
| Hup | Upper output border (%) | Real | Input | false | 100 |
| Hdwn | Neither output border (%) | Real | Input | false | 0 |
| Zi | Insensitivity (%) | Real | Input | false | 0 |
| followSp | Follow to variable by setpoint into manual | Boolean | Input | false | 1 |
| K1 | Coefficient of input 1 | Real | Input | false | 0 |
| in1 | Input 1 | Real | Input | false | 0 |
| K2 | Coefficient of input 2 | Real | Input | false | 0 |
| in2 | Input 2 | Real | Input | false | 0 |
| K3 | Coefficient of input 3 | Real | Input | false | 0 |
| in3 | Input 3 | Real | Input | false | 0 |
| K4 | Coefficient of input 4 | Real | Input | false | 0 |
| in4 | Input 4 | Real | Input | false | 0 |
| impAnOut | Analog position of impulse regulator | Real | Input | false | 0 |
| impAnImit | Analog position imitation | Boolean | Input | false | 0 |
| impQupTm | Imp. output up lag for GUI Integer | Output | false | 0 | |
| impQdwnTm | Imp. output down lag for GUI | Integer | Output | false | 0 |
| f_frq | Calc frequency (Hz) | Integer | Input | true | 1 |
| f_start | First start | Boolean | Input | true | 0 |
| f_stop | Last start | Boolean | Input | true | 0 |
| int | Integral accumulation | Real | Output | true | 0 |
| dif | Differential accumulation | Real | Output | true | 0 |
| lag | Lag accumulation | Real | Output | true | 0 |
| impLag | Impulse lag time | Real | Output | true | 0 |
| perLag | New impulse generation time | Real | Output | true | 0 |
Structure:
PID äèíàìè÷åñêèé (pidUnifD)
Description: Ïîëíîñòüþ èäåíòè÷íûé óíèôèöèðîâàííîìó ÏÈÄ ðåãóëÿòîð, ðåàëèçîâàííûé äèíàìè÷åñêè íà JavaLikeCalc. Äèíàìè÷åñêàÿ ðåàëèçàöèÿ ïîçâîëÿåò ëåãêî àäàïòèðîâàòü ðåãóëÿòîð ïîä íóæíûå òðåáîâàíèÿ, ïðîñòî îòðåäàêòèðîâàâ åãî.
Parameters:
| ID | Parameter | Type | Mode | Hide | Default |
| var | Ïåðåìåííàÿ | Âåùåñòâ. | Âõîä | false | 0 |
| sp | Çàäàíèå | Âåùåñòâ. | Âõîä | false | 0 |
| max | Ìàêñèìóì øêàëû | Âåùåñòâ. | Âõîä | false | 100 |
| min | Ìèíèìóì øêàëû | Âåùåñòâ. | Âõîä | false | 0 |
| manIn | Ðó÷íîé ââîä | Âåùåñòâ. | Âõîä | false | 0 |
| out | Âûõîä (%) | Âåùåñòâ. | Âîçâðàò | false | 0 |
| impQup | Èìï. âûõîä ââåðõ | Ëîãè÷. | Âûõîä | false | 0 |
| impQdwn | Èìï. âûõîä âíèç | Ëîãè÷. | Âûõîä | false | 0 |
| analog | Àíàëîãîâûé | Ëîãè÷. | Âõîä | false | 1 |
| auto | Àâòîìàò | Ëîãè÷. | Âõîä | false | 0 |
| casc | Êàñêàä | Ëîãè÷. | Âõîä | false | 0 |
| Kp | Kï | Âåùåñòâ. | Âõîä | false | 1 |
| Ti | Tè (ìñ) | Öåëûé | Âõîä | false | 1000 |
| Kd | Êï ïðîèçâîäíîé | Âåùåñòâ. | Âõîä | false | 1 |
| Td | Tä (ìñ) | Öåëûé | Âõîä | false | 0 |
| Tzd | T çàäåðæêè äèôåðåíöèðîâ. (ìñ) | Öåëûé | Âõîä | false | 0 |
| TImpPer | T ïåðèîä èìïóëüñà (ìñ) | Öåëûé | Âõîä | false | 5000 |
| TImpMin | T ìèíèìàëüíàÿ äëèíà èìïóëüñà (ìñ) | Öåëûé | Âõîä | false | 500 |
| KImpRfact | Ðåéòèíã ôàêòîð èìïóëüñà | Âåùåñòâ. | Âõîä | false | 1 |
| Hup | Âåðõíÿÿ ãðàíèöà âûõîäà (%) | Âåùåñòâ. | Âõîä | false | 100 |
| Hdwn | Íèæíÿÿ ãðàíèöà âûõîäà (%) | Âåùåñòâ. | Âõîä | false | 0 |
| Zi | Íå÷óâñòâèòåëüíîñòü (%) | Âåùåñòâ. | Âõîä | false | 0 |
| followSp | Ñëåäèòü çàäàíèåì çà ïåðåìåííîé â ðó÷íîì | Ëîãè÷. | Âõîä | false | 1 |
| K1 | Êîåô. âõîäà 1 | Âåùåñòâ. | Âõîä | false | 0 |
| in1 | Âõîä 1 | Âåùåñòâ. | Âõîä | false | 0 |
| K2 | Êîåô. âõîäà 2 | Âåùåñòâ. | Âõîä | false | 0 |
| in2 | Âõîä 2 | Âåùåñòâ. | Âõîä | false | 0 |
| K3 | Êîåô. âõîäà 3 | Âåùåñòâ. | Âõîä | false | 0 |
| in3 | Âõîä 3 | Âåùåñòâ. | Âõîä | false | 0 |
| K4 | Êîåô. âõîäà 4 | Âåùåñòâ. | Âõîä | false | 0 |
| in4 | Âõîä 4 | Âåùåñòâ. | Âõîä | false | 0 |
| impAnOut | Àíàëîãîâîå ïîëîæåíèå èìïóëüñíîãî ðåãóëÿòîðà èëè ñêîðîñòü õîäà êðàíà (%/ñ) ïðè èìèòàöèè. | Âåùåñòâ. | Âõîä | false | 0 |
| impAnImit | Èìèòàöèÿ àíàëîãîâîãî ïîëîæåíèÿ | Ëîãè÷. | Âõîä | false | 0 |
| impQupTm | Èìï. âûõîä ââåðõ óäåðæ. äëÿ GUI | Öåëûé | Âûõîä | false | 0 |
| impQdwnTm | Èìï. âûõîä âíèç óäåðæ. äëÿ GUI | Öåëûé | Âûõîä | false | 0 |
| f_frq | ×àñòîòà âû÷èñëåíèÿ (Ãö) | Öåëûé | Âõîä | true | 1 |
| f_start | Ïåðâûé çàïóñê | Ëîãè÷. | Âõîä | true | 0 |
| f_stop | Ïîñëåäíèé çàïóñê | Ëîãè÷. | Âõîä | true | 0 |
| impLag | Âðåìÿ óäåðæàíèÿ èìïóëüñà | Âåùåñòâ. | Âûõîä | true | 0 |
| perLag | Âðåìÿ ãåíåðàöèè íîâîãî èìïóëüñà | Âåùåñòâ. | Âûõîä | true | 0 |
| integ | Íàêîïëåíèå èíòåãðàëà | Âåùåñòâ. | Âûõîä | true | 0 |
| difer | Íàêîïëåíèå ïðîèçâîäíîé | Âåùåñòâ. | Âûõîä | true | 0 |
| dlag | Íàêîïëåíèå çàäåðæêè ïðîèçâîäíîé | Âåùåñòâ. | Âûõîä | true | 0 |
Structure:
file:pid_unif.png
PID èìïóëüñíûé (pidImp)
Description: Ñïåöèàëèçèðîâàííûé èìïóëüñíûé ÏÈÄ ðåãóëÿòîð ðåàëèçîâàííûé ïî îñîáîìó àëãîðèòìó ñ êîìïåíñàöèåé äâîéíîãî èíòåãðèðîâàíèÿ.
Parameters:
| ID | Parameter | Type | Mode | Hide | Default |
| var | Ïåðåìåííàÿ | Âåùåñòâ. | Âõîä | false | 0 |
| sp | Çàäàíèå | Âåùåñòâ. | Âõîä | false | 0 |
| max | Ìàêñèìóì øêàëû | Âåùåñòâ. | Âõîä | false | 100 |
| min | Ìèíèìóì øêàëû | Âåùåñòâ. | Âõîä | false | 0 |
| manIn | Ðó÷íîé ââîä | Âåùåñòâ. | Âõîä | false | 0 |
| out | Âûõîä (%) | Âåùåñòâ. | Âîçâðàò | false | 0 |
| outPID | Âûõîä PID | Âåùåñòâ. | Âûõîä | false | 0 |
| impQup | Èìï. âûõîä ââåðõ | Ëîãè÷. | Âûõîä | false | 0 |
| impQdwn | Èìï. âûõîä âíèç | Ëîãè÷. | Âûõîä | false | 0 |
| auto | Àâòîìàò | Ëîãè÷. | Âõîä | false | 0 |
| casc | Êàñêàä | Ëîãè÷. | Âõîä | false | 0 |
| Kp | Kï | Âåùåñòâ. | Âõîä | false | 1 |
| Ki | Êï èíòåãðàëà | Âåùåñòâ. | Âõîä | false | 1 |
| Ti | Tè (ìñ) | Öåëûé | Âõîä | false | 1000 |
| Kd | Êï ïðîèçâîäíîé | Âåùåñòâ. | Âõîä | false | 1 |
| Td | Tä (ìñ) | Öåëûé | Âõîä | false | 0 |
| Tzd | T çàäåðæêè äèôåðåíöèðîâ. (ìñ) | Öåëûé | Âõîä | false | 0 |
| TImpPer | T ïåðèîä èìïóëüñà (ìñ) | Öåëûé | Âõîä | false | 5000 |
| TImpMin | T ìèíèìàëüíàÿ äëèíà èìïóëüñà (ìñ) | Öåëûé | Âõîä | false | 500 |
| KImpRfact | Ðåéòèíã ôàêòîð èìïóëüñà | Âåùåñòâ. | Âõîä | false | 1 |
| Hup | Âåðõíÿÿ ãðàíèöà âûõîäà (%) | Âåùåñòâ. | Âõîä | false | 100 |
| Hdwn | Íèæíÿÿ ãðàíèöà âûõîäà (%) | Âåùåñòâ. | Âõîä | false | 0 |
| Zi | Íå÷óâñòâèòåëüíîñòü (%) | Âåùåñòâ. | Âõîä | false | 0 |
| followSp | Ñëåäèòü çàäàíèåì çà ïåðåìåííîé â ðó÷íîì | Ëîãè÷. | Âõîä | false | 1 |
| K1 | Êîåô. âõîäà 1 | Âåùåñòâ. | Âõîä | false | 0 |
| in1 | Âõîä 1 | Âåùåñòâ. | Âõîä | false | 0 |
| K2 | Êîåô. âõîäà 2 | Âåùåñòâ. | Âõîä | false | 0 |
| in2 | Âõîä 2 | Âåùåñòâ. | Âõîä | false | 0 |
| K3 | Êîåô. âõîäà 3 | Âåùåñòâ. | Âõîä | false | 0 |
| in3 | Âõîä 3 | Âåùåñòâ. | Âõîä | false | 0 |
| K4 | Êîåô. âõîäà 4 | Âåùåñòâ. | Âõîä | false | 0 |
| in4 | Âõîä 4 | Âåùåñòâ. | Âõîä | false | 0 |
| impAnOut | Àíàëîãîâîå ïîëîæåíèå èìïóëüñíîãî ðåãóëÿòîðà èëè ñêîðîñòü õîäà êðàíà (%/ñ) ïðè èìèòàöèè. | Âåùåñòâ. | Âõîä | false | 0 |
| impAnImit | Èìèòàöèÿ àíàëîãîâîãî ïîëîæåíèÿ | Ëîãè÷. | Âõîä | false | 0 |
| impQupTm | Èìï. âûõîä ââåðõ óäåðæ. äëÿ GUI | Öåëûé | Âûõîä | false | 0 |
| impQdwnTm | Èìï. âûõîä âíèç óäåðæ. äëÿ GUI | Öåëûé | Âûõîä | false | 0 |
| f_frq | ×àñòîòà âû÷èñëåíèÿ (Ãö) | Öåëûé | Âõîä | true | 1 |
| f_start | Ïåðâûé çàïóñê | Ëîãè÷. | Âõîä | true | 0 |
| f_stop | Ïîñëåäíèé çàïóñê | Ëîãè÷. | Âõîä | true | 0 |
| impLag | Âðåìÿ óäåðæàíèÿ èìïóëüñà | Âåùåñòâ. | Âûõîä | true | 0 |
| perLag | Âðåìÿ ãåíåðàöèè íîâîãî èìïóëüñà | Âåùåñòâ. | Âûõîä | true | 0 |
| integ | Íàêîïëåíèå èíòåãðàëà | Âåùåñòâ. | Âûõîä | true | 0 |
| difer | Íàêîïëåíèå ïðîèçâîäíîé | Âåùåñòâ. | Âûõîä | true | 0 |
| dlag | Íàêîïëåíèå çàäåðæêè ïðîèçâîäíîé | Âåùåñòâ. | Âûõîä | true | 0 |
| err1 | Îøèáêà øàã íàçàä | Âåùåñòâ. | Âûõîä | true | 0 |
| err2 | Îøèáêà äâà øàãà íàçàä | Âåùåñòâ. | Âûõîä | true | 0 |
Structure:
file:pid_imp.png